发明专利转让:一种新型海滩垃圾清洁车及其使用方法
【专利名称】一种新型海滩垃圾清洁车及其使用方法
【专利号】2018109256562
【申请日】2018年08月15日
【法律状态】专利权维持
【专利权人】罗永恒
【专利摘要】本发明提供了一种新型海滩垃圾清洁车及其使用方法,包括车体、垃圾收集装置及控制系统;所述车体上设有翻转连接架;所述翻转连接架的端部与垃圾收集装置活动套接,尾部设有翻转齿轮及翻转弧道;所述垃圾收集装置包括收集仓及收集通道;所述收集通道铰接在收集仓上,端部设有翻沙头及活动滚藻装置;所述收集仓的尾部设有防水燃油发动机,内部设有烘干管及集热管;所述烘干管通过集热管连接防水燃油发动机;所述收集仓侧面设有伸缩挂钩杆;所述伸缩挂钩杆上悬挂有打捞网;所述控制系统包括车辆控制模块、远程控制及反馈模块、GPS定位模块、船间控制及感应模块及巡航打捞模块。本发明设计巧妙,适合当前新出现海滩垃圾及浒苔双重困扰的地区使用。
【发明内容】
技术领域
本发明属于海滩清洁器械领域,具体涉及一种新型海滩垃圾清洁车及其使用方法。
背景技术
随着人们生活水平的不断提高,沙滩度假成为一种生活时尚,但沙滩白色垃圾以及浒苔等环境污染问题也伴随而来。传统的浒苔清理方法一般都是靠人力驾船打捞,满载浒苔并驶回岸边的打捞船还需要人工卸货,并将打捞上来的浒苔运送至指定地点处理,此方式存在工作效率低下,耗费人力较多的缺点;如浒苔面积较大,需使用多艘打捞船联合打捞,多人操作时在船与船之间配合上容易出现疏漏,且一般的打捞船体积都较大,在浅海或礁石较多的海域不便使用,影响浒苔的清理效果及效率。而目前用于清理沙滩垃圾的清理车一般采用轮式或双履带的行走结构,轮式结构容易陷入软质沙土中,双履带的结构不易转弯,影响了设备的灵活性,降低沙滩垃圾清理的效率。近年来我国的渤海湾、黄海、东海和南海均不同程度遭受到浒苔的侵扰,而沙滩垃圾问题也日益加重,为了清理沙滩垃圾及浒苔爆发,各地每年都在加强投入。
公开专利申请号为201220523662.3的中国实用新型公布了一种沙滩浒苔清理机,包括自动捡拾装置,自动捡拾装置与输送设备配合使用,输送设备连接有动力驱动装置和脱水装置,脱水装置的下面设置有运输装置,运输装置配备有行走装置。本发明通过自动捡拾装置拾取被海滩冲上沙滩表面的浒苔,并经过输送设备运输;本发明能够较低成本的收集沙滩上的浒苔,但无法对沙滩沙层下的垃圾进行很好的清洁,更无法行驶至海面,对海面上的浒苔进行主动清理,其功能性存在不足。
为了减少海滩清理成本,提高清理效率及效果,需设计一种可同时用与沙滩垃圾及浅海浒苔清理的高效多功能海滩垃圾清理设备。
发明内容
为解决上述问题,本发明提供了一种新型海滩垃圾清洁车及其使用方法。通过组合式的垃圾收集装置可进行沙滩垃圾及浅海浒苔的清理,实现了一机多用的功能,且设备倾倒效果好,自动化程度高,运行灵活方便,通过远程控制减少海上事故的发送,节约了人力物力,并能够实现编队工作,提高工作效率,非常适合受海滩垃圾及浒苔双重困扰的地区使用。
本发明的技术方案如下:
一种新型海滩垃圾清洁车,包括车体、垃圾收集装置及控制系统;所述垃圾收集装置设置在车体的前方;所述车体的前端设有翻转连接架,上部设有操作室,底部设有独立的四组履带移动机构;所述翻转连接架包括翻转轴、支撑架、翻转齿轮及翻转弧道;所述翻转轴倾斜向上设置在车体的前端,内部设有液压马达Ⅰ;所述支撑架穿过翻转轴,并连接所述液压马达Ⅰ;所述支撑架的前端分出四组支撑叉,所述支撑叉的中间设有叉槽;每两组所述支撑叉上下排布,对应所述垃圾收集装置的两个侧面;所述翻转齿轮设置在支撑架的尾部,并设有与所述液压马达Ⅰ同步的液压马达Ⅱ;所述翻转弧道设置在车体上,并向下弯曲;所述翻转弧道的内部设有凸齿;所述翻转齿轮套接入翻转弧道内;所述凸齿与翻转齿轮啮合;所述垃圾收集装置包括收集仓及收集通道;所述收集通道铰接在收集仓的前端,并向下倾斜,接触地面;所述收集通道的前端设有活动滚藻装置;在所述收集通道与收集仓前端接触的部位处连接有折叠帆布;所述收集仓为头尖尾平的小艇形状,侧面设有固定柱;所述收集仓通过固定柱与翻转连接架固定连接;所述收集仓的尾部设有两组防水燃油发动机,内部设有烘干管及集热管;所述烘干管直立,并向四周分布设有出气孔;所述集热管的一端连接防水燃油发动机的机舱,另一端通入烘干管内;在所述收集仓的一侧通过万向节连接有伸缩挂钩杆;所述伸缩挂钩杆的端部设有弯钩;在所述伸缩挂钩杆上整齐折叠悬挂有打捞网;在所述收集仓的两侧均设有位置感应器;所述控制系统包括车辆控制模块、远程控制及反馈模块、GPS定位模块、船间控制及感应模块及巡航打捞模块;所述车辆控制模块、远程控制及反馈模块集成于操作室内;所述GPS定位模块、船间控制及感应模块和巡航打捞模块集成于垃圾收集装置内。所述翻转连接架连接车体及垃圾收集装置;操作人员在所述操作室内控制整个设备运行;所述履带移动机构支撑车体行走;所述翻转轴通过翻转齿轮及翻转弧道的啮合转动,带动整个垃圾收集装置翻转;所述液压马达Ⅰ给翻转轴的转动提供动力;所述支撑架与垃圾收集装置连接;所述收集通道将垃圾收集并运输至收集仓内存放;所述收集通道可向后翻折;所述折叠帆布在收集通道翻折后打开,确保所述收集仓侧面的封闭性;所述收集仓可在防水燃油发动机的带动下在水面行驶;所述集热管将防水燃油发动机内部的热量传导到烘干管中,再通过所述出气孔散发出来,辅助烘干从海中打捞上来的浒苔;所述伸缩挂钩杆用以悬挂打捞网,并可伸缩勾住另一所述垃圾收集装置;所述万向节用以调节伸缩挂钩杆的方向;所述位置感应器用于感应附近的其他垃圾收集装置。
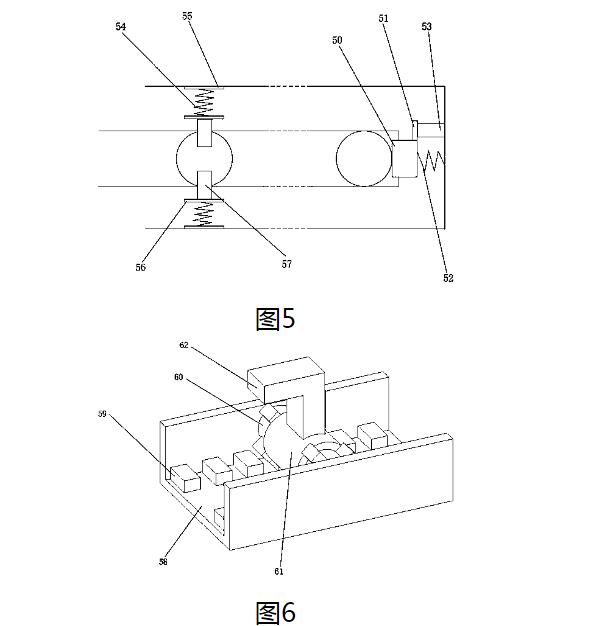
进一步的,所述收集通道包括罩体、侧挡板、翻沙头、输送带、滚筒、椭圆凸轮Ⅰ、椭圆凸轮Ⅱ、回振弹簧、挤压液压缸及挤压球;所述罩体的两端开口,侧面铰接在所述收集仓的边沿;两组所述滚筒设置在罩体内;所述输送带套在两组滚筒上;所述输送带为多孔网状结构,表面上设有输送挡板;两组所述椭圆凸轮Ⅱ分别设置在输送带末端的左右两侧,并顶住所述输送带;至少两组所述椭圆凸轮Ⅰ设置在输送带的中部,其旋转中心与两组所述滚筒的旋转中心位于同一直线上;所述椭圆凸轮Ⅰ的长直径比滚筒的直径长,短直径比所述滚筒的直径短;所述回振弹簧设置在输送带的端部,并顶住所述输送带;所述翻沙头为尖头铲状,铰接在罩体的前端,并在铰接处连接角度调整电机;在所述翻沙头上设有翻沙输送带;所述翻沙输送带的表面设有翻沙挡板;在所述翻沙头的端部设有超声波动物驱赶装置;所述活动滚藻装置包括弯折机械臂、滚藻筒、滚藻电机、皮带轮Ⅰ、皮带及皮带轮Ⅱ;所述弯折机械臂的一头固定在收集通道的前端,另一头分出两道支叉,所述两道支叉分别连接滚藻筒的两端;两组所述滚藻电机分别设置在弯折机械臂前端的两边支叉内;所述皮带轮Ⅰ连接滚藻电机;所述皮带轮Ⅱ连接在滚藻筒的端部;所述皮带套在皮带轮Ⅰ及皮带轮Ⅱ上;所述滚藻筒上布满外伸的筒钉;所述挤压液压缸设置在罩体的顶部,并向所述罩体内部伸出,正对着所述椭圆凸轮Ⅰ;所述挤压球设置在挤压液压缸的端部;所述滚筒、椭圆凸轮Ⅰ、椭圆凸轮Ⅱ及翻沙输送带均连接有动力电机Ⅰ。所述罩体防止收集到的垃圾掉落;所述滚筒带动输送带转动;所述输送挡板将垃圾带回,沙子从所述输送带上的小孔中漏下;所述椭圆凸轮Ⅱ及回振弹簧配合使输送带前后振动,加快沙子漏下;所述椭圆凸轮Ⅰ使输送带上下振动,加快沙子漏下;所述翻沙头铲入沙地内,配合所述翻沙挡板将沙层中的垃圾铲出并通过翻沙输送带回收至输送带上;所述超声波动物驱赶装置驱赶沙层中的沙蟹等小动物;所述挤压液压缸及挤压球配合椭圆凸轮Ⅰ可将收集到的浒苔水分挤出;当设备在沙滩上收集垃圾时,所述弯折机械臂弯曲,将所述活动滚藻装置收在收集通道的上端;当所述垃圾收集装置进入海中收集浒苔时,所述弯折机械臂伸出,将所述滚藻筒伸到翻沙头的前端;所述滚藻电机转动,依次通过所述皮带轮Ⅰ、皮带及皮带轮Ⅱ带动滚藻筒转动,所述筒钉将浒苔卷入收集通道内。
进一步的,所述垃圾收集装置还包括发动机升降轨道、升降轮、螺旋桨、电加热丝及动力源;所述发动机升降轨道竖直设置在收集仓的尾部;所述升降轮设置在防水燃油发动机上,并套接在所述发动机升降轨道内;所述防水燃油发动机的转子向下连接有传动装置;所述传动装置为由传动轴及齿轮组成的传动机构;所述螺旋桨连接在传动装置上;所述升降轮连接有升降电机;所述集热管上设置有微型吸气泵;所述电加热丝设置在收集仓的内壁中;所述动力源包括油箱及电瓶;所述油箱连接防水燃油发动机;所述电瓶连接电加热丝;在所述收集通道入口处的两侧面上均设有吸藻泵;所述吸藻泵靠外的一侧设有吸藻口,靠内的一侧设有出藻口;所述吸藻口连接有水管;所述出藻口通到收集通道内。所述垃圾收集装置在陆地上使用时防水燃油发动机处于发动机升降轨道的顶端,当下水收集浒苔时,所述防水燃油发动机通过升降轮及升降电机降至发动机升降轨道的最低处,使所述螺旋桨浸没海水中,则可推进所述垃圾收集装置前进;当要转弯时,其中一边的所述防水燃油发动机熄火,即可实现转弯;所述微型吸气泵将防水燃油发动机内的热气吸入集热管中;所述电加热丝启动发热,也可蒸发浒苔中的水分;所述吸藻泵通过吸藻口将海水及浒苔吸入收集通道中,海水从所述传送带上的小孔流出,浒苔进入所述垃圾收集装置中。
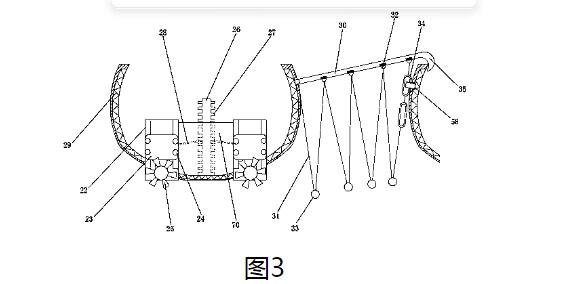
进一步的,所述打捞网的顶部设有挂扣,底部设有配重块;在所述打捞网的网边处设有连接扣;所述打捞网通过挂扣悬挂在伸缩挂钩杆上。所述配重块可使打捞网垂直下沉,并便于在垃圾收集装置的拉扯下在水下展开。
进一步的,在所述伸缩挂钩杆的内部设置有锁杆,下部分布排列有至少十个挂口;所述锁杆的端部连接锁止电机;在所述挂口的侧面设有弯折锁柱;在所述弯折锁柱的尾部弯折部位处设有锁柱弹簧;所述锁柱弹簧的一端顶住弯折锁柱,另一端顶住所述述伸缩挂钩杆的内壁;所述弯折锁柱的直柱部位对准挂口,弯折部位向上弯曲;在所述锁杆与弯折锁柱对应的部位设有旋转凸块;所述旋转凸块顶住弯折锁柱的弯折部位;在所述收集仓的一侧设有网扣轨道;所述网扣轨道的内表面两侧分列设置两道轨道齿;所述轨道齿上设有网扣齿轮;所述轨道齿与网扣齿轮啮合;在两个所述网扣齿轮的中间设有扣轮;所述扣轮的内部设有动力电机Ⅱ;所述扣轮的上方竖直设有弯折的网扣。一般情况下,所述锁柱弹簧将弯折锁柱拉回,使所述弯折锁柱不进入挂口中;将所述挂扣套入挂口中后,所述锁止电机带动锁杆转动,使所述旋转凸块顶住弯折锁柱的弯折部位,将所述弯折锁柱的直柱部位顶入挂口中,锁止所述挂扣;所述网扣齿轮在动力电机Ⅱ的带动下在网扣轨道内旋转移动,所述扣轮跟随移动,但不旋转;当所述网扣勾上打捞网上的连接扣时,所述扣轮翻转,所述网扣将打捞网上的连接扣扣住固定;此时所述打捞网的两端分别连接在两组相邻的垃圾收集装置上。
进一步的,在所述支撑叉的末端内壁中设有锁止开关、开关铜片、开关弹簧Ⅰ及开关铜柱;所述锁止开关的前端伸入支撑叉上的叉槽内;所述开关铜片连接在锁止开关的末端部;所述开关铜柱设置在开关铜片之后;所述开关弹簧Ⅰ的一端连接在支撑叉的内壁中,另一端顶住所述锁止开关的末端;所述叉槽中部的内壁上设有开口;在所述叉槽中部的内壁中设有开关弹簧Ⅱ、电磁铁Ⅰ、电磁铁Ⅱ及连接锁柱;所述电磁铁Ⅰ固定在叉槽的内壁中;所述开关弹簧Ⅱ的一端连接在电磁铁Ⅰ上,另一端连接连接所述电磁铁Ⅱ;所述接锁柱设置在电磁铁Ⅱ上,并对准所述支撑叉中部的开口;在所述固定柱上设有凹槽;所述凹槽与连接锁柱对应。所述支撑叉缓慢套在垃圾收集装置的两侧,所述固定柱进入叉槽内;当最先进入所述叉槽内的固定柱碰到锁止开关后,即确认所述支撑叉与垃圾收集装置套接到位;所述锁止开关被往后顶,使所述开关铜片触碰开关铜柱,则接通控制电路;所述电磁铁Ⅰ与电磁铁Ⅱ通电,相互排斥,将所述连接锁柱顶入固定柱上设置的凹槽中,使所述垃圾收集装置与翻转连接架稳固固定在一起。
进一步的,所述车体的尾部还设有整平装置;所述支撑叉的端部还设有活动感应块;在所述收集仓的前端、侧面、内部、及顶部均设有旋转高清摄像头;所述收集仓的底部设有重力感应器及温湿度感应器;所述操作室内设有触控式操作屏;所述整平装置倾斜向下,垂至地面;所述四组履带移动机构均连接车体的动力装置;所述超声波动物驱赶装置的超声波发射频率为18.8-70Khz;所述吸藻泵的吸藻口及出藻口的口径比例较一般水泵要大。所述整平装置可在车体开过后将沙地整平;所述活动感应块感应固定柱与支撑叉的结合;在出海打捞浒苔时,所述高清摄像头将垃圾收集装置各方位的影响实时拍摄并传送给操作室的操作人员;所述重力感应器检测垃圾收集装置内的垃圾和浒苔是否的重量;所述温湿度感应器检测垃圾收集装置内的温度和湿度;操作人员通过所述操作屏控制整个设备。
进一步的,所述车体为一般履带式推进车结构;所述车辆控制模块连接着车体的动力系统及转向系统;所述远程控制及反馈模块通过GSM通信网络及海洋通信卫星连接船间控制及感应模块;所述GPS定位模块向远程控制及反馈模块发送实时位置信号;每台所述垃圾收集装置上的船间控制及感应模块组成感应网络;所述巡航打捞模块连接收集仓及收集通道。操作人员通过所述动力系统及转向系统控制车体移动;所述远程控制及反馈模块通过GSM通信网络及海洋通信卫星实时接收掌握垃圾收集装置的信息,并控制所述垃圾收集装置;所述船间控制及感应模块可实现多组圾收集装置的相互感应及配合操作;所述巡航打捞模块可控制圾收集装置在一定范围海域内自动来回移动打捞浒苔。
本发明的使用方法包括以下步骤:
1)沙滩垃圾清理:垃圾收集装置通过固定柱固定在车体的翻转连接架上;收集通道自收集仓的前端向下倾斜,翻沙头插入沙土中;设备启动后,随着车体的推进,翻沙输送带将沙土连同垃圾翻到输送带上;此时椭圆凸轮Ⅱ转动,配合回振弹簧使输送带沿两组滚筒的轴心连线方向振动;椭圆凸轮Ⅰ转动,通过长短边位置的旋转变换,使输送带在垂直于两组滚筒的轴心连线方向上振动;此时细小的沙土通过输送带的网孔被震落回到地面,而垃圾则由输送带送至收集仓内;在垃圾清理时,超声波动物驱赶装置开启,通过发出超声波驱赶沙土里的沙蟹;
2)垃圾倾倒:收集好垃圾后收集通道向后翻转,盖住收集仓;车体行驶到指定地点;翻转轴及翻转齿轮在液压马达Ⅱ的带动下将翻转连接架连带垃圾收集装置向后翻转;垃圾收集装置翻至车体的后方,并上下颠倒;收集通道翻折打开,此时收集仓内的垃圾自然掉落;翻转连接架重复旋转翻倒,使垃圾完全落下;
3)分体:车体行驶到海边,使垃圾收集装置进到海中;升降轮将防水燃油发动机降下,使螺旋桨浸到海水里;固定柱松开,则垃圾收集装置成为一艘小艇,在防水燃油发动机的带动下在海面移动;
4)近海浒苔清理:操作人员在操作室内通过远程控制及反馈模块控制垃圾收集装置移动到浒苔爆发的海域,再发出命令使收集通道翻转后倾斜向下;在垃圾收集装置的移动下浒苔被输送带输送至收集仓内;吸藻泵通过水管从侧面将海水和浒苔吸入输送带中;海水从输送带的网孔中流出;浒苔通过输送带时,椭圆凸轮Ⅰ的长边将输送带顶起,挤压液压缸将挤压球顶出,挤压浒苔内的水;集热管将防水燃油发动机内部的热气通过烘干管传导到收集仓内,同时电加热丝启动,烘干收集仓内部的水分;旋转高清摄像头将清理浒苔的当前画面通过船间控制及感应模块时时发送给远程控制及反馈模块,并在操作室的操作屏上显示;GPS定位模块向远程控制及反馈模块发送垃圾收集装置的当前位置;巡航打捞模块控制垃圾收集装置在浒苔爆发区域内自动收集浒苔;当浒苔收集到一定的重量时,收集仓的底部的重力感应器感应满仓,则提示返航;返航后的垃圾收集装置再与车体结合,并通过车体将浒苔倾倒出来;
5)联合清理浒苔:如果浒苔爆发的范围较广,则采取联合清理的方式;操作人员在操作室内控制至少两台垃圾收集装置行驶到浒苔爆发的地点,并通过船间控制及感应模块将垃圾收集装置排列成指定阵型,两台垃圾收集装置之间的距离控制在5m范围之内;此时伸缩挂钩杆斜向上翻转转出,使弯钩勾到相邻垃圾收集装置的边沿,此时打捞网被带到相邻的垃圾收集装置边上;所述网扣在网扣轨道上移动,直至扣住打捞网上的连接扣后翻转扣紧;此时相邻的两个垃圾收集装置横向拉开距离,同时挂扣脱离伸缩挂钩杆,使打捞网横向铺开;操作人员通过远程控制及反馈模块控制收集装置按照既定阵型行驶,打捞网将浒苔收集到小范围内再进行清理。
与现有技术相比,本发明的优点:
1.本发明的车体与垃圾收集装置可任意组合及拆分,组合时能够清理沙滩上的垃圾,拆分后可清理海面上的浒苔,实现了一机多用的功能,节约了设备购买成本,适合海滩垃圾较多,且伴随有浒苔问题的地区使用。
2.本发明中的翻转连接架可将垃圾收集装置向后翻转倾倒,并可往复运动,使垃圾可以完全倒出。
3.本发明中的垃圾收集装置可在操作人员的远程操作下出海打捞浒苔,无需人力同船驾驶,节省了出海操作装置的空间,可装载更多的浒苔,也减少了海上事故的风险,并且设备小巧灵活,可在浅海及多礁石海域工作,其自动化程度高,适用效果好。
4.本发明中的垃圾收集装置在出海打捞浒苔时可压缩浒苔,并利用防水燃油发动机产生的热量将收集到的浒苔烘干,便于提高浒苔的装载量。
5.本发明中在降浒苔打捞回岸边后无需人力卸料,通过垃圾收集装置与车体的组合,即可利用车体将浒苔带至指定区域并完全倾倒,节约了人力,提高了工作效率。
6.本发明的垃圾收集装置可在操作人员的远程指挥下对大面积的浒苔进行多台设备配合的联合清理,由远程控制及反馈模块、GPS定位模块和船间控制及感应模块的模块化控制实现工作,减少了人为配合时的纰漏,提高了浒苔清理的效率。
7.本发明的车体通过四履带机构进行移动,既确保了设备在松软沙滩上的通过性,也避免了履带移动机构转弯不灵活的问题。
8.本发明的垃圾收集装置在海上收集浒苔时,活动滚藻装置能够起到增强收集的作用,使设备工作效率得到提高。
9.本发明通过组合式的垃圾收集装置可进行沙滩垃圾及浅海浒苔的清理,实现了一机多用的功能,且设备倾倒效果好,自动化程度高,运行灵活方便,通过远程控制减少海上事故的发送,节约了人力物力,并能够实现编队工作,提高工作效率,非常适合受海滩垃圾及浒苔双重困扰的地区使用。
【附图】



【合作方式】专利权转让
【价格】面议
